专业的IT培训机构
|
腾科IT教育集团
Prometric考试中心
VUE考试中心
关于我们
深圳校区
切换校区
集团
广州
首页
课程中心
新闻中心
学员感言
开班计划
认证考试
名师汇聚
网络
操作系统
数据库
软件开发
专题课程
华为专题
红帽专题
Oracle专题
思科专题
微信
电话
复制成功
微信号:
togogoi
添加微信好友, 详细了解课程
已复制成功,如果自动跳转微信失败,请前往微信添加好友
打开微信
腾科新闻
首页
>
腾科新闻
>
帧中继网络拓扑环境
发布时间:
2022-10-11
帧中继网络拓扑环境
,由于用户对帧中继的使用要求不同,帧中继的连接方式可分为三种,如图1、图2和图3所示的拓扑结构给出了运行帧中继的网络环境下三种不同的连接方式。
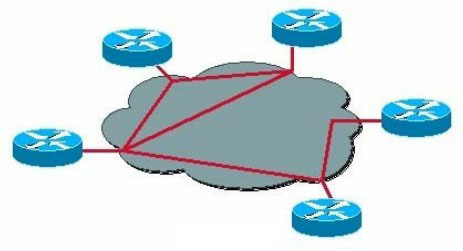
图1 全互联模式连接
图2 部分互联模式连接
图3 星形互联模式连接
● 全互联模式如图1所示,在这个拓扑结构中的每台路由器都有到其他目的地的虚电路连接。使用这种连接方式的费用较高,但它提供了从各个站点到所有其他站点的直接连接,并且提供了冗余性。
当其中一条链路出现故障时,路由器可以通过其他站点改变传输路径。例如,当站点A到站点B的链路失效时,站点A的路由器可以将原来传输到站点B的数据流量经过站点C到站点B重新路由。随着全互联拓扑结构中站点数的增加,拓扑结构的费用可能变得非常的昂贵。
● 部分互联模式如图2所示,在这个拓扑中不是所有的站点都可以直接访问到所有的其他站点。在依赖这种传输模式的网络中,一个站点可以额外附加PVC,连接到有巨大数据流量的远程站点,从而在比较重要的站点之间实现冗余。
● 星形互联模式如图3所示,这种拓扑结构也被称为“中心和分支”配置,是最普遍的帧中继网络拓扑结构。在这种拓扑环境下,远程站点通常被连接到一个提供服务或应用的中心站点。
这是一种最经济的拓扑结构,这是因为它所需要的永久虚电路的数量较之以上两种拓扑来说是最少的。在这种情况下,中心路由器提供一条点对多点连接,因为它通常使用一个单一接口连接多条永久虚电路。该连接类型不具有冗余性。
以上就是帧中继工作环境下的三种不同的互联模式,它们根据不同的环境满足不同的网络的需求。在上述任何一种拓扑中,在一台路由器的一个物理接口上只连接一条PVC的时候,各种连接类型都可以工作得很好。
但是当存在一台路由器的一个单一物理端口必须被连接到多个站点,即一个单一物理端口连接多条PVC(点到多点连接)的时候,而我们又在该帧中继网络中使用了距离矢量路由协议,就会产生水平分割阻止路由更新的问题。
分享到:
QQ空间
新浪微博
腾讯微博
人人网
微信
更多
上一篇:
linux如何查看树目录结构
下一篇:
帧中继技术术语与流量术语
联系电话:18924184114
华为认证
思科认证
oracle认证
红帽认证
常见问题
2022年思科认证考试费多少钱?
2022年思科认证考试报名时间是?
思科认证怎么报名考试?
思科认证培训多少钱?
2022年华为认证考试费多少钱?
2022年华为认证考试报名时间是?
华为认证怎么报名考试?
华为认证培训多少钱?
2022年红帽认证考试费用多少钱?
2022年红帽考试报名时间是?
怎么报名红帽认证考试?
红帽培训多少钱?
Oracle认证考试官方费用是多少?
2022Oracle认证报考条件是什么?
2022年Oracle认证考试时间是?
Oracle dba认证培训费用是多少?
Java零基础可以学习吗?
UI设计师培训多少钱?
HTML5前端开发难学吗?
立即咨询
联系电话:18924184114
在线咨询
在线咨询
×
您好,请问有什么可以帮您?我们将竭诚提供最优质服务!
QQ咨询
下次再说